Industrial Consultancy & Sponsored Research (IC&SR) , IIT Madras
Rocker arm assembly :
- Split rocker-arm assembly interconnected with dual differential allows for the synchronous as well as asynchronous actuation on uneven terrain.
Differential gearbox mechanism :
- Dual differential layer can achieve pitch averaging and actively control chassis roll using only single actuator and the offset arm spur gear arrangement.
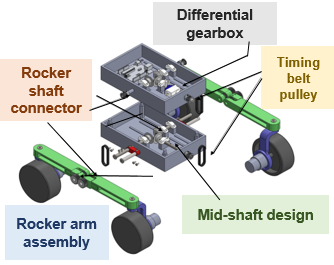
Mid-shaft design :
- Incorporates a mid-shaft arrangement with coaxial spur arrangement enabling passive movement for pitch stabilisation.
Rocker shaft connector :
- Features a connector with groove ball bearing and gear arrangement to synchronize the gearbox mechanisms on the top and bottom layers of the chassis, ensuring coordinated movement.
Rocker shaft connector :
- Incorporates timing pulley-belt to prevent the rover from collapsing under its own weight.